نوشته های مشابه


GPS برای تعیین منبع زلزله و سیستم های هشدار سونامی در زمان واقعی
جنبههای طراحی کلیدی یک سیستم مبتنی بر GPS (و در آینده، سیستمهای مبتنی بر GNSS) را طراحی میکنیم که میتواند به تعیین منبع زلزله و سیستمهای هشدار سونامی در زمان واقعی کمک کند. رویکرد ما مبتنی بر مدلهای جابجایی گذرا و دائمی ایستگاههای GPS ناشی از زلزلههای بزرگ است، در حالی که تأثیر خطاهای GPS بر پارامترهای منبع زلزله معکوس را در نظر میگیرد. نتیجه گیری اصلی ما این است که (۱) الگوی فضایی، بزرگی و زمان جابجایی دائمی ایستگاه های GPS را می توان برای منبع زلزله معکوس کرد و بنابراین میدان جابجایی سه بعدی کف اقیانوس را پیش بینی کرد، بنابراین شرایط اولیه را برای مدل های سونامی فراهم کرد. و (۲) هیچ عامل محدود کننده ذاتی ناشی از خطاهای زمان واقعی مدار و موقعیت یابی وجود ندارد، مشروط بر اینکه ایستگاه های GPS میدان نزدیک کافی مستقر شده باشند. این سیگنال میتواند به آسانی توسط شبکههای GPS در حال حاضر مورد بهرهبرداری قرار گیرد، و با اجرای پروژه IGS Real-Time تسهیل خواهد شد.
از آنجایی که تکنیکهای ژئودتیک فعلی به توانایی نظارت بر حرکات زمین با دقت میلیمتری در محدوده پهنای باند ۱s تا ۱۰ سال نزدیک میشوند، آشکار میشود که سیستم مشاهده جهانی ژئودتیک (GGOS) باید برای پیش بینی خطرات زمین و سیستم های هشدار اولیه مورد بهره برداری قرار گیرد . خطراتی که می تواند توسط ژئودزی مورد توجه قرار گیرد شامل زلزله، سونامی، رانش زمین و فوران های آتشفشانی است و البته ژئودزی می تواند تغییرات آب و هوایی جهانی و طغیان های ساحلی مرتبط با افزایش سطح دریا و فرونشست زمین را نیز مورد توجه قرار دهد. در اینجا ما بر روی کاربرد سیستم موقعیت یاب جهانی (GPS)، و (در آینده) استفاده از سیستمهای ماهوارهای ناوبری جهانی (GNSS)، برای تعیین منبع زلزله در زمان واقعی، و مشکل هشدار سونامی تمرکز میکنیم. ما همچنین شناسایی میکنیم که چگونه سرویس بینالمللی GNSS (IGS) احتمالاً نقش مهمی در چنین برنامههایی دارد. ساعت اول برای هشدار زودهنگام سونامی در سطح اقیانوس بسیار مهم است. نکته اساسی برای تولید سونامی، پتانسیل و انرژی جنبشی است که توسط جابجایی سریع زمین لرزه ای کف اقیانوس به اقیانوس منتقل می شود. سونامی های پهناور اقیانوس مستلزم این هستند که زمین لرزه دارای گشتاور لرزه ای به اندازه کافی بزرگ باشد، که متناسب با ضریب لغزش گسل و مساحت صفحه گسیختگی است. با توجه به اینکه مقدار ممان Mw زلزله بر حسب گشتاور لرزه ای M0 تعریف می شود.
این مشکل به انواع مختلف مقیاس بزرگی زلزله مربوط می شود که می توان در مدت کوتاهی پس از زلزله به دست آورد، که می تواند برای زلزله های بزرگ اشباع شود. (عکس. ۱). این مورد زلزله با بزرگای گشتاوری۹٫۲ سوماترا در سال ۲۰۰۴ بود که مرگبارترین سونامی در سراسر اقیانوس را در تاریخ ایجاد کرد. با استفاده از روشی به نام Mwp، تخمین قدر اولیه ۸٫۰ در ۱۱ دقیقه پس از زلزله به دست آمد. در عرض ۱ ساعت، با استفاده از دادههای امواج سطحی، برآوردها به Ms 8.5 افزایش یافت. در عرض ۵ ساعت تخمین دوباره به Mw9.0 افزایش یافت. چند روز بعد، از نوسانات آزاد زمین مشخص شد که قدر واقعی Mw9.2 است. در حالی که این تخمین های بزرگی در حال تجدید نظر بودند، در عرض ۳ ساعت، سونامی با سرعت یک هواپیمای جت از اقیانوس عبور کرد و سواحل تایلند، سریلانکا و هند را ویران کرد. بر اساس نظریه منابع زلزله، نمودار لگاریتم دامنه امواج تابشی در مقابل لگاریتم فرکانس (شکل ۱) در فرکانس پایین (دوره طولانی) صاف است و سپس برای فرکانسهای بالاتر (دورههای کوتاهتر از) “گوشه” ازبین میرود. فرکانس های متناسب با ۱ در زمان های مورد نیاز برای انتشار گسیختگی در طول گسل و برای لغزش کامل در نقطه ای از گسیختگی. هر چه زلزله بزرگتر باشد، فرکانسهای گوشهای بیشتر به سمت چپ طرح منتقل میشود. معیارهای مختلف «بزرگای زلزله» از انرژی لرزهای تابش شده در دورههای مختلف استفاده میکنند.
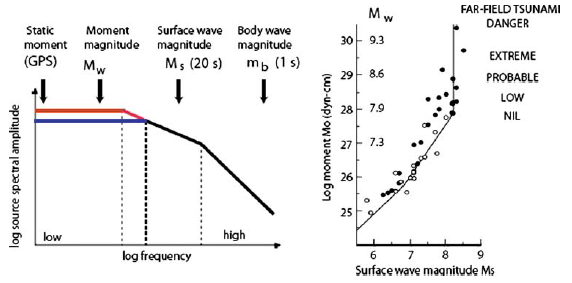
شکل ۱ (سمت چپ) تصویری از طیف زلزله که فرکانس های گوشه ای (خطوط عمودی خط چین) و تعیین بزرگی های مختلف را نشان می دهد. زمین لرزه ای که طیف آن با رنگ قرمز نشان داده شده است دارای Mw بزرگتر از زلزله ای است که طیف آن به رنگ آبی نشان داده شده است، حتی اگر اندازه امواج سطح و حجمی یکسان باشد، همانطور که توسط قسمت سیاه طیف که برای هر دو زلزله یکسان است نشان داده شده است. GPS از قسمت پایینترین فرکانس طیف نمونهبرداری میکند و بهعنوان یک سیستم اندازهگیری حوزه زمان، میتواند به راحتی از انحراف استاتیک نمونهبرداری کند. (راست) به دلیل اشباع بزرگای امواج سطحی، زمین لرزه های Ms یکسان می توانند لحظات لرزه ای بسیار متفاوتی داشته باشند و بنابراین خطر ایجاد سونامی در سراسر اقیانوس را دارند.
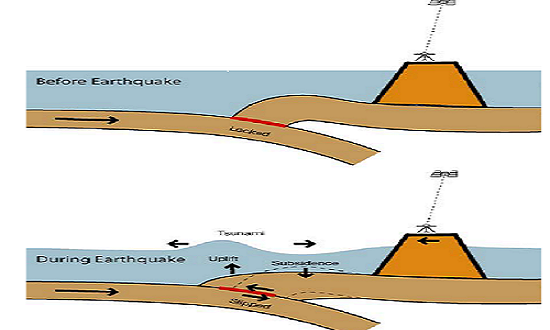
از سوی دیگر، GPS میتواند تغییر شکل هملرزهای دائمی سطح زمین را اندازهگیری کند و بنابراین میتواند برای تخمین گشتاور لرزهای (از این رو Mw) بدون هیچ مشکلی در حالت اشباع استفاده شود (شکل ۲). الزامات اساسی این است که (۱) شبکه GPS دارای ایستگاه های میدان نزدیک کافی (در عرض ۱ طول گسیختگی) برای گرفتن سیگنال جابجایی دائمی باشد، (۲) شبکه GPS دارای ایستگاه های میدان دور کافی برای ارائه یک چارچوب جامع باشد. محدود به لحظه لرزه ای، (۳) ایستگاه های GPS داده های خود را در زمان واقعی (تقریبا) ارسال می کنند، و (۴) سیستم های تجزیه و تحلیل GPS برای مدیریت داده های نزدیک به زمان واقعی، از جمله برآورد دقیق مدارهای GPS، و همچنین تخمین جابجایی GPS شرط اول مستلزم توجه ویژه برای مناطقی است که به طور بالقوه می توانند زمین لرزه های رانش بزرگ ایجاد کنند (شکل ۳). شبکه جهانی IGS به طور طبیعی از شرط دوم مراقبت می کند. پروژه آزمایشی بلادرنگ IGS گامی ارزشمند در جهت برآوردن الزامات (۳) و (۴) است، اگرچه کار زیادی برای توسعه سیستمهای تجزیه و تحلیل بلادرنگ باقی مانده است. می توان نیاز (۴) را به دو بخش تقسیم کرد: تولید پارامترهای مدار و ساعت در زمان واقعی و تولید موقعیت های ایستگاه GPS در زمان واقعی. در این مدل تقسیمبندی شده، IGS ممکن است نقش ارائه مدارها و ساعتهای بلادرنگ را در نظر بگیرد. یکی از سؤالاتی که در اینجا به آن می پردازیم، نیاز به دقت مدارهای بلادرنگ در چنین مدل تقسیم بندی شده است.
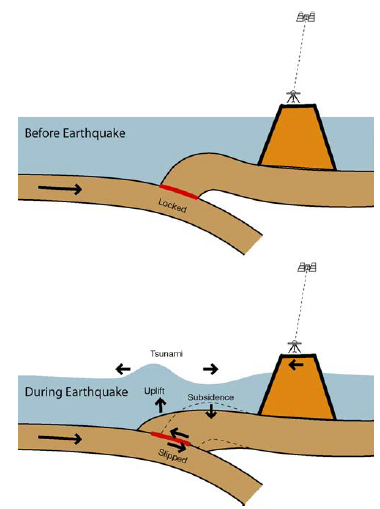
شکل ۲ شماتیک مفهوم استفاده از جابجایی دائمی GPS را به عنوان وسیله ای برای مدل سازی شرایط اولیه برای پیدایش سونامی، با وارونگی پارامترهای صفحه گسیختگی، و از این رو پیش بینی جابجایی کف اقیانوس نشان می دهد. توجه داشته باشید که این جابجایی افقی ایستگاه های GPS در خشکی است که بیشترین اطلاعات را برای پیش بینی جابجایی سه بعدی کف اقیانوس فراهم می کند.
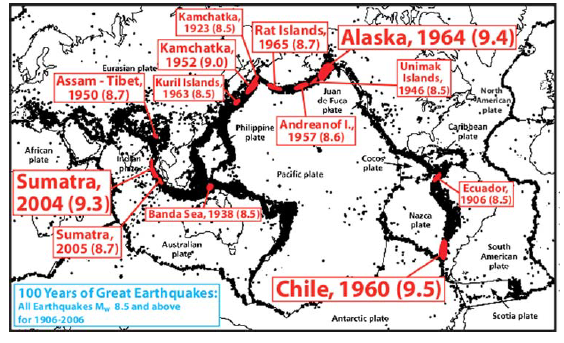
شکل ۳ زمین لرزه های بزرگ Mw > 8.5 (به رنگ قرمز) که در دوره ۱۹۰۶-۲۰۰۶ رخ داده است. زمین لرزه های کوچکتر به صورت نقاط سیاه نشان داده می شوند که مرزهای صفحات تکتونیکی اصلی را مشخص می کنند.
بلوویت و همکاران (۲۰۰۶b) نشان داد که مشاهدات GPS می تواند در زمان واقعی برای تعیین دقیق بزرگی زمین لرزه سوماترا در سال ۲۰۰۴ تنها با استفاده از داده ها در ۱۵ دقیقه پس از زمان مبدا مورد استفاده قرار گیرد. سری زمانی برای دو ایستگاه GPS میدان نزدیک آن مطالعه در شکل ۴ خلاصه شده است. این به طور طبیعی منجر به این ایده شد که ایستگاه های GPS دائمی می توانند به سیستم های هشدار اولیه کمک کنند. که به نوبه خود انگیزه ای برای مطالعه جنبه های طراحی سیستم فراهم کرد. در اینجا ما سؤال تحقیقاتی زیر را مطرح میکنیم: “مشخصات طراحی کلیدی یک سیستم مبتنی بر GPS که تعیین تقریباً واقعی مدلهای منبع زلزله بزرگ را با دقت و وضوح کافی برای سیستمهای هشدار سونامی ممکن میسازد چیست؟”
جنبه های مختلفی از طراحی سیستم در نظر گرفته شده است، از جمله (۱) فیزیک نحوه رسیدن جابجایی “دائمی” با امواج لرزه ای، زیرا بر زمان بندی سیگنالی که روش مبتنی بر aGPS برای معکوس کردن منبع استفاده می کند تأثیر می گذارد.
مولفه های؛ (۲) هندسه شبکه GPS، که باید برای درک الگوی فضایی جابجایی زمین به منظور حل مدل منبع زلزله کافی باشد. (۳) خطاهای زمان واقعی موقعیت یابی GPS، هر دو فعلی، و آنچه ممکن است با توجه به مدارهای بلادرنگ از IGS امکان پذیر باشد. و (۴) جنبه های طراحی گسترده تر از نقطه نظر ارائه اطلاعات مفید برای تصمیم گیرندگان، با قابلیت ردیابی مشخصات سیستم تا الزامات هشدار اولیه.
زمان جابجایی دائمی
ما ابتدا در نظر گرفتیم که چگونه دادههای GPS را برای گیرندههای نزدیک به یک زلزله رانش بزرگ ترکیب کنیم. اکثر رویکردها می توانند مسافت امواج را که در یک لرزه نگاری مشاهده می شود یا پایان استاتیکی که روی گیرنده GPS مشاهده می شود، پیش بینی کنند. با این حال، برای شبیهسازی دادههای بلادرنگ، میخواهیم چگونگی تکامل میدان جابجایی ترکیبی را پیشبینی کنیم. ما انتظار داشتیم این کار را با استفاده از جمع حالت عادی انجام دهیم، اما از نظر محاسباتی غیرعملی بود

شکل ۴ جابجایی های دائمی GPS مشاهده شده در طول زلزله ۲۰۰۴ Mw 9.2 سوماترا نشان داد که در عرض چند دقیقه، جابجایی های دائمی را می توان با دقت ۱۰ میلی متری بدست اورد . سایتهای SAMP و NTUS در میدان نزدیک (در حدود ۱ طول گسیختگی) از نظر آماری اطلاعات قابلتوجهی را ارائه میکنند که از آن میتوان بزرگی زلزله را بدست اورد (شکل ۲) بهعنوان اینکه در محدودهای هستند که قادر به ایجاد یک سونامی در سراسر اقیانوس هستند (شکل ۸). ). اقتباس از بلوویت و همکاران. (۲۰۰۶b). ستاره زرد کانون زلزله است
در عوض، ما یک رویکرد تابع گرین جدید را اتخاذ کردیم که توسط وانگ (۲۰۰۳) توسعه یافت. آزمایشهای اولیه ما از این کد کامپیوتری نشان میدهد که میتواند میدان جابهجایی ترکیبی را ایجاد کند که نشان میدهد چگونه زمان سیر موج به عبارت استاتیک تبدیل میشود. شکل ۵ نمونه ای از حرکت زمین شبیه سازی شده را نشان می دهد که زمان رسیدن جابجایی دائمی را نشان می دهد، که سیگنال کلیدی است که GPS باید استخراج کند. ما اکنون در حال سنتز سوابق زمین لرزه های شکاف بزرگ برای تجزیه و تحلیل هستیم. این شبیهسازیها تأیید میکنند که در تئوری، جابجایی دائمی با رسیدن امواج لرزهای پدیدار میشود و باید ظرف چند دقیقه قابل حل باشد. در اصل، وضوح سریعتر را می توان با میانگین گیری از طریق نوسانات به دست آورد، که به GPS با نرخ بالا (تقریبا ۱ هرتز) نیاز دارد. این ممکن است استدلالی برای GPS با نرخ بالا برای فعال کردن هشدارهای به موقع برای مورد سونامی های میدان نزدیک باشد. در غیر این صورت، برای سونامی های سراسر اقیانوس، از این شبیه سازی ها مشخص است که GPS با نرخ “استاندارد” فعلی (۱۵ یا s 30) فواصل) برای حل جابجایی دائمی کافی است، همانطور که برای زلزله سوماترا در سال ۲۰۰۴ ثابت شد.
هندسه شبکه
ما شبیهسازیهایی را برای سناریوهای فرضی در منطقه منطقه فرورانش Cascadia، در غرب آمریکای شمالی، که در آن زمینلرزههای بزرگ قطعاً قادر به ایجاد سونامی مخرب هستند، توسعه دادهایم. و در حال حاضر بسیاری از ایستگاه های GPS دائمی وجود دارد که می توانند در آینده به عنوان بخشی از یک سیستم هشدار بلادرنگ عمل کنند . شکل ۶ الگوی فضایی شبیه سازی شده جابجایی دائمی را نشان می دهد که به مکان های ایستگاه های GPS دائمی فعلی نگاشت شده است. سپس از جابجایی های مشاهده شده برای تعیین پارامترهای منبع زلزله استفاده می شود و بنابراین شرایط اولیه را برای مدلهای سونامی همانطور که در شکل ۲ نشان داده شده است فراهم میکند. روش دیگر، همانطور که سونگ (۲۰۰۷) پیشنهاد کرده است، رویکرد “بزرگای سونامی” را میتوان مستقیماً از دادههای جابجایی GPS ساحلی به کار برد. اگرچه زمان برای کمک قابل توجهی به جوامع هشدار دهنده در امتداد سواحل Cascadia بسیار کوتاه است، اما نتایج برای هشدار دادن به مکان های دورتر ارزشمند است.
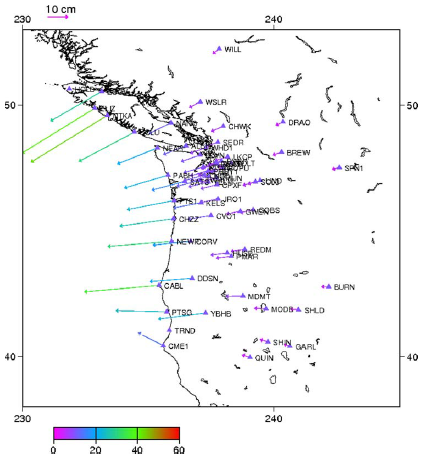
شکل ۶ نمونه ای از جابجایی های دائمی شبیه سازی شده در ایستگاه های GPS در نتیجه زلزله ۹٫۰ Mw در ناحیه فرورانش Cascadia. بنابراین جابجایی ها در نزدیکی ساحل چندین سانتیمتر است که Blewitt و همکاران. (۲۰۰۶b) نشان میدهد که بزرگای بیشتر از عدم قطعیتهای استنباط شده با استفاده از GPS پس از ۱۵ دقیقه است.
با در نظر گرفتن این مطالعه و مطالعه قبلی با هم، نتیجه می گیریم که سیگنال جابجایی دائمی در رکوردهای GPS حرکت زمین باید برای اهداف زلزله شناسی استخراج شود.
روش invention source این رویکرد این مزیت را دارد که GPS را حداکثر با رویکرد شکل موج گذرا که توسط لرزهشناسی اتخاذ میشود، تکمیل میکند، بنابراین لایهای از قطعیت را در سیستم هشدار چندتکنیکی فراهم میکند.
خطاهای GPS در زمان واقعی
هدف از این جنبه از مطالعه، روشن کردن پارامتر های مهم است، زیرا آنها به دقت مدار و استراتژی تخمین پارامتر مربوط میشوند. نکته جالب توجه این بود که چگونه خطاها در مدارهای بلادرنگ که در حال حاضر توسط IGS توزیع میشوند در سریهای زمانی موقعیت ایستگاه GPS منتشر میشوند، و چگونه این خطاها در وارونگی پارامترهای منبع زلزله منتشر میشوند. در بررسی پتانسیل GPS برای سیستمهای هشدار سونامی (Blewitt et al. 2006b)، ما قبلاً از یک روش “بهترین ممکن” استفاده کرده بودیم که به طور همزمان پارامترهایی از جمله بردارهای وضعیت مدار ماهواره را تخمین زده بود (با استفاده از Broadcast Ephemeris بدست آمده قبل از زلزله) . فشار تشعشعات تصادفی خورشید بر روی ماهواره ها، ساعت های ماهواره و ایستگاه در هر دوره ۳۰ ثانیه ای، موقعیت قطب زمین و نرخ رانش، نرخ چرخش زمین، تغییرات تصادفی راه رفتن در تاخیر تروپوسفر اوج و شیب در هر ایستگاه، سوگیری های فاز حامل و لغزش چرخه، و موقعیت ایستگاه (شکل ۷، پایین).
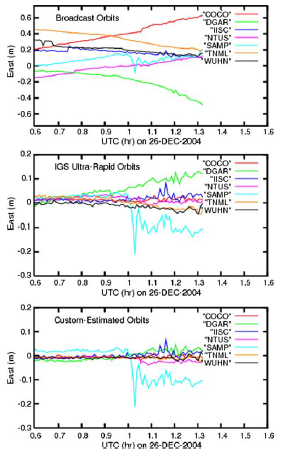
شکل ۷ سری زمانی مختصات شرقی (۳۰ ثانیه) در ۲۶ دسامبر ۲۰۰۴ برای ایستگاه های GPS دائمی (در چند طول گسیختگی) با استفاده از مدارهای پخش (بالا)، مدارهای فوق سریع IGS (وسط) و (پایین) تخمینی سفارشی تخمین زده شد. مدارها توجه داشته باشید که مقیاس y برای مدارهای پخش ۳ برابر بزرگتر است. در تمام موارد، ساعت های ماهواره ای تخمین زده شد
در اینجا ما گزینههای جایگزین برای زمان واقعی مدارهای ، از جمله مدارهای Broadcast Ephemeris و IGS Ultra-Rapid را با استفاده از آنها در تجزیه و تحلیل زلزله سوماترا در سال ۲۰۰۴ آزمایش کردیم. در تمام موارد، ساعتهای ماهوارهای در هر دوره بهعنوان نویز سفید (معادل تفاضل مضاعف) تخمین زده شدند. و برای کاهش چندمسیری از فیلتر sidereal استفاده شد . مدارهای فوق سریع IGS ۴ بار در روز منتشر می شوند که هر کدام با تاخیر اولیه ۳ ساعت است. در نتیجه، تأخیر واقعی در زمان واقعی در محدوده ۳ تا ۹ ساعت قرار می گیرد. در این مورد خاص، تأخیر ۷ ساعت بود، به این معنی که مدارها در واقع ۷ ساعت جلوتر تا زمان زلزله پیشبینی شده بودند. برای آزمایش اینکه آیا رانشهای سیستماتیک مشهود در شکل ۷ (وسط) به دلیل اشتباهات در پیشبینی بوده است یا خیر، ما مدارهای فوق سریع IGS را که ۶ ساعت بعد منتشر شد، با تأخیر ۱ ساعت (نمایش داده نشده) آزمایش کردیم. رانشهای بسیار مشابه مشهود بود، بنابراین به نظر نمیرسد که پیشبینی علت اصلی این رانشها باشد.
سریهای زمانی حاصل نشان میدهد که رانشها و جهشهای سیستماتیک بر راهحلهای با استفاده از Broadcast Ephemeris غالب هستند (شکل ۷، بالا). در مقابل، سریهای زمانی با استفاده از مدارهای تخمین زده شده (شکل ۷، پایین) تا زمانی که امواج لرزهای به هر ایستگاه برسند (در ساعت ۰۱:۰۰ UTC)، بسیار مسطح هستند، پس از آن ایستگاهها برای همیشه جابهجا میشوند. مدارهای فوق سریع IGS نتایجی را با جابجایی های سیستماتیک جزئی در مقایسه با مدارهای تخمین زده شده ایجاد می کنند (شکل ۷، وسط).
برای آزمایش عملکرد مدارهای سریع IGS، از روش قبلی (Blewitt و همکاران ۲۰۰۶b) برای تخمین جابجاییها از سریهای زمانی (با مهلت ۱۵ دقیقه) پیروی کردیم و سپس خوب بودن تناسب را برای انواع مدلهای گسیختگی به سمت شمال محاسبه کردیم. با محدوده Mw 8.0-9.5 (شکل ۸). یک F نسبت به بهترین مدل برازش محاسبه شد تا محدوده فرم مدلهای Mw را که از نظر کیفیت تفاوت قابلتوجهی با بهترین مدل برازش ندارند، ارزیابی کرد. سپس نتایج با نتایج مربوط به مدارهای تخمینی ارائه شده در Blewitt و همکاران مقایسه شد. (۲۰۰۶b). در حالی که برای مدارهای تخمینی Mw با اطمینان ۹۵% به محدوده ۸٫۸-۹٫۱ محدود شده است، برای مدارهای فوق سریع IGS فقط به محدوده ۸٫۶-۹٫۳ محدود شده است. در این مورد، نتایج مربوط به مدارهای فوق سریع IGS برای اهداف هشدار سونامی، به دلیل مشکل هشدارهای نادرست، به اندازه کافی دقیق نیستند.
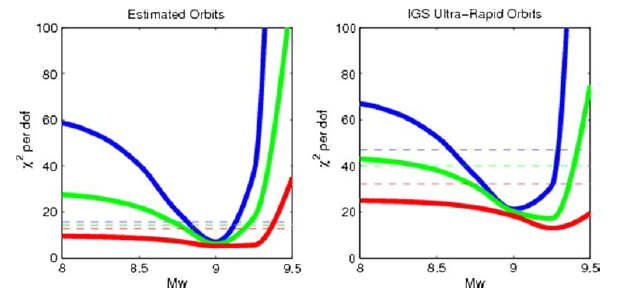
شکل ۸ chi-square کاهش یافته که ناهماهنگی جابجایی ها را به عنوان تابعی از Mw (سمت چپ) با استفاده از مدارهای تخمین زده شده خلاصه می کند. (۲۰۰۶b)؛ (راست) با استفاده از مدارهای فوق سریع IGS. برای هر طرح، سه حالت نشان داده شده است: همه ایستگاه ها (آبی)، همه به جز نزدیکترین (۳۰۰ کیلومتر) ایستگاه SAMP (سبز)، و همه به جز SAMP و نزدیکترین (۹۰۰ کیلومتر) ایستگاه NTUS (قرمز). خطوط چین نشان دهنده فاصله اطمینان ۹۵ درصد است
جنبه های طراحی گسترده تر
به طور کلی، پیشبینی موفقیتآمیز و هشدار اولیه به دو طراحی بسیار متفاوت سیستم نیاز دارد. از یک سو، سیستمهای پیشبینی با اندازهگیریهای با دقت بالا، مدلسازی و درک دقیق و پایداری طولانیمدت برای ارائه یک چارچوب استاندارد استاندارد به عنوان مبنایی برای پیشبینی مشخص میشوند. از سوی دیگر، سیستمهای هشدار اولیه با حساسیت زمان واقعی، پاسخ خودکار به رویدادها و استحکام در برابر هشدارهای اشتباه مشخص میشوند. از آنجایی که مخاطرات زمینی اغلب با فرآیندهای تجمعی طولانیمدت منجر به رویدادهای شدیداً آسیبرسان میشوند، اگر دو سیستمی که برای پیشبینی و هشدار اولیه استفاده میشوند در یک چارچوب خودسازگار، همانطور که توسط GGOS ارائه میشود، توسعه داده شوند، یک مزیت آشکار وجود دارد. به این ترتیب، طراحی سیستم هشدار اولیه را می توان با درک به دست آمده از سیستم پیش بینی بهتر آگاه کرد. پیشبینی همچنین به هدفگیری مؤثرتر سیستمهای هشدار کمک میکند. موقعیت یابی دقیق با استفاده از GPS (و در آینده، GNSS) را می توان با سرعت بالا در زمان واقعی انجام داد، و بنابراین می تواند پهنای باند را از چند ثانیه به چند دهه پل بزند، و در عین حال امکان هشدار اولیه را فراهم می کند، در حالی که اتصال طولانی مدت را فراهم می کند. اجزای پایدار GGOS برای پیشبینی مورد نیاز است.
نتیجه گیری
الگوی مکانی، بزرگی و زمان جابجایی دائمی ایستگاههای GPS سیگنال کلیدی مورد استفاده است، به این صورت که میتوان آن را برای منبع زلزله معکوس کرد، که به نوبه خود مقدار جابجایی کف اقیانوس را فراهم میکند که میتواند مدلهای شروع سونامی را هدایت کند (Titov et al. al. 2005)، یا برآوردکننده های بزرگی سونامی (Song 2007). ما هیچ عامل محدود کننده ذاتی ناشی از خطای زمان واقعی مدار و موقعیتیابی را نمییابیم، مشروط بر اینکه ایستگاههای GPS نزدیک میدان کافی مستقر شده باشند. سیگنال جابجایی دائمی را می توان به راحتی توسط شبکه های GPS موجود در منطقه Cascadia شناسایی و مورد بهره برداری قرار داد. در واقع، هندسه شبکه جیپیاس (غیر زمان واقعی) در شمال غربی اقیانوس آرام برای دست یافتن به زلزلههای بزرگ در منطقه فرورانش Cascadia که قادر به ایجاد سونامی در سطح اقیانوس هستند، در عرض چند دقیقه کافی است. این پروژه طراحی سیستم اولین گام مهم را در ترکیب GPS در تعیین منبع زلزله و سیستم های هشدار سونامی در زمان واقعی ارائه می دهد، که می تواند از طریق انتقال داده های GPS در زمان واقعی پیاده سازی شود. مدلهای سونامی بلادرنگ توسط NOAA/PMEL برای پیادهسازی توسط PTWC توسعه مییابند (Titov و همکاران ۲۰۰۵). چنین مدل هایی نیاز به مقداردهی اولیه با استفاده از پارامترهای منبع زلزله در زمان واقعی دارند که می تواند از ترکیبی از لرزه شناسی و ژئودزی حاصل شود. برای سونامی در سطح اقیانوس، پیشبینی ارتفاع موج سونامی در میدان دور فقط به لحظه لرزهای و محل منبع گسترده حساس است. اهمیت بلندمدت این پروژه اجرای نهایی یک سیستم عملیاتی برای ارائه مدلهای سونامی با اطلاعات منبع زلزله حیاتی است.
در سریع ترین زمان ممکن این امر به کاهش خسارات آتی ناشی از سونامی گسترده اقیانوسی که به هاوایی خواهد رسید کمک می کند. و ساحل غربی آمریکا در نتیجه این کار مقدماتی، ما اکنون با آژانسهای مختلف فدرال ایالات متحده (NASA، NOAA، و USGS) برای توسعه یک سیستم عملی بلادرنگ همکاری میکنیم. ما همچنین با GEO، GGOS، و IGS کار می کنیم تا دسترسی به داده های GNSS بلادرنگ در سراسر جهان را بهبود بخشیم.
Blewitt, Geoffrey, et al. “GPS for real-time earthquake source determination and tsunami warning systems.” Journal of geodesy ۸۳ (۲۰۰۹): ۳۳۵-۳۴۳٫